未来工場で、取組みを実施した研究開発の一部をご紹介します
ロボットの自律移動の研究
1.Droneを自律飛行させる
当社では、「ロボットを自律的に移動させるには?」というテーマで研究を行っています。
移動ロボットにAR.Droneを、環境情報を取得する機器としてRaspberry Piを(Raspberry Piとカメラ、超音波センサ、磁方位を接続しています)、および自律移動プログラムを実行し、ロボットへ指示を出す制御端末を用いて検証を進めています。
2.研究のコンセプト
なお、研究するにあたり、以下のコンセプトを設定しています。
- 現在のオープンソースでロボットを開発する可能性を探る
- 最低限のリソースで素早く開発・検証する
3.チャレンジ
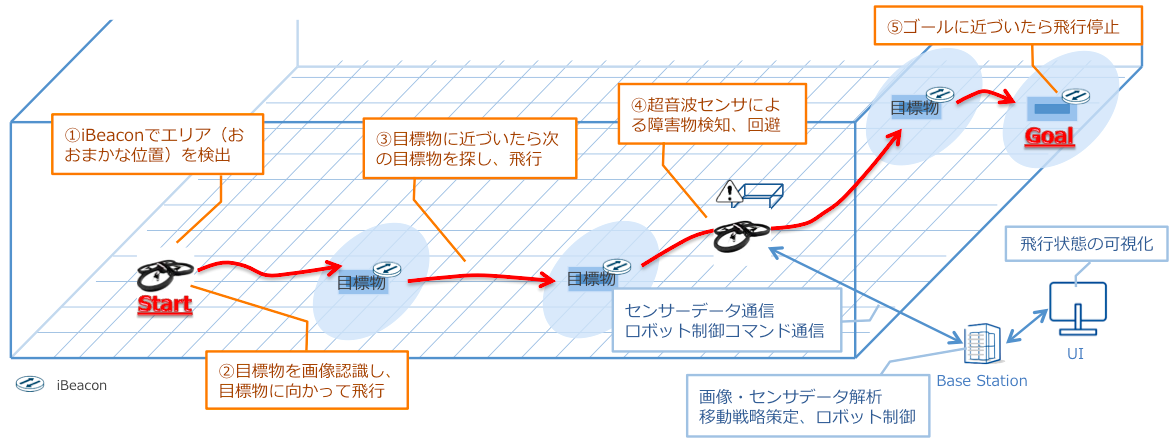
Droneの自律飛行研究における具体的な検証項目は、以下の3つです。
- ロボットの自己位置推定
ロボットの自己位置推定は、ロボットの自律制御を行う上で切っても切れない問題です。本研究ではiBeaconの情報を基に自己位置推定を行います。 - 目標物認識と認識した目標物への移動制御
スタートからゴールまでの間にいくつか道標となるものを設置し、その目標物に向かって移動させ、ゴールに辿り着けるか検証します。 - 障害物の検知とその回避
ロボットと目標物の経路上に障害物を設置し、障害物の検知精度、検知した場合に想定通りに回避し、目標物まで問題なく移動できるか検証します。